摘要
不同坐标系下,向量依然不变,无论它在哪里,它都是那个独一无二的自己。
正文
矩阵旋转-Eigen应用(QTCreator编辑器)
 最近毕业设计准备研究研究SLAM,拜读了高翔老师的《SLAM十四讲》,所以就在这里记录一下一点儿学习笔记
最近毕业设计准备研究研究SLAM,拜读了高翔老师的《SLAM十四讲》,所以就在这里记录一下一点儿学习笔记
一、概述
-
旋转变换的核心思想
在不同坐标系下,虽然坐标不同,但是同一个向量还是一样的。这句话有点儿怪怪的,但是可以用数学公式表出:\(\beta_1^T\cdot\alpha_1=\beta_2^T\cdot\alpha_2\),其中\(\beta\)是不同坐标系的标准正交基(行分块),\(\alpha\)是不同坐标系下的坐标(列向量)。
-
旋转变换的五种表述
- 旋转矩阵;
- 欧式矩阵;
- 旋转向量;
- 欧拉角;
- 四元数;
-
旋转变换表述的演替
- 旋转矩阵和平移矩阵:有小尾巴累积(非线性)
- 欧式矩阵:n+1维方阵要\((n+1)^2\)个自由度,太多了(线性,但不紧凑且不直观)
- 旋转向量:这是什么呀这一堆数?!看不懂!(紧凑但不直观)
- 欧拉角:这会看懂了…等等,这转个90\(^\circ\)咋就膈屁了呢?!(紧凑直观但奇异)
- 四元数:爱咋转咋转…等等不对!咋1个\(R\)冒俩\(q\)呢?\(q\)咋还内讧了呢?(紧凑非奇异,但不唯一且不稳定)
-
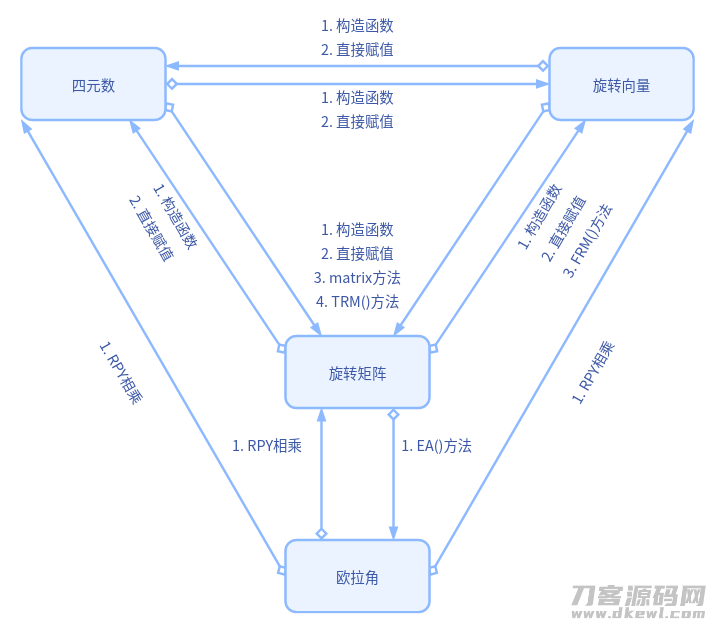
在Eigen库中它们四个大哥(欧式矩阵对不起,现在我们只考虑旋转)的转换关系
旋转向量和四元数先初始化(默认定义为‘单位阵’,不能赋值为nullptr或者直接使用)!!!
-
旋转矩阵
-
初始化旋转矩阵
Eigen::Matrix3d rotation_matrix; // 通过标准输入设备(标准输入流)键入赋值 rotation_matrix << x_00,x_01,x_02,x_10,x_11,x_12,x_20,x_21,x_22; -
旋转矩阵 \(\Longrightarrow\) 旋转向量
// 第一种:通过构造函数(传入一个旋转矩阵) Eigen::AngleAxisd rotation_vector(rotation_matrix); // 第二种:首先初始化,然后通过旋转矩阵直接赋值(重载了赋值运算符) Eigen::AngleAxisd rotation_vector; rotation_vector = rotation_matrix; // 第三种:首先初始化,然后from函数直接作用于this对象(rotation_vector) Eigen::AngleAxisd rotation_vector; rotation_vector.fromRotationMatrix(rotation_matrix); -
旋转矩阵 \(\Longrightarrow\) 欧拉角
// (2, 1, 0)表示旋转顺序ZYX,数字越小表示优先级越高 Eigen::Vector3d euler_angle = rotation_matrix.eulerAngles(2, 1, 0); -
旋转矩阵 \(\Longrightarrow\) 四元数
// 第一种:通过构造函数(传入一个旋转矩阵) Eigen::Quaterniond quaternion(rotation_matrix); // 第二种:首先初始化,然后通过旋转矩阵直接赋值(重载了赋值运算符) Eigen::Quaterniond quaternion; quaternion = rotation_matrix;
-
-
旋转向量
-
初始化旋转向量
// 通过构造函数 Eigen::AngleAxisd rotation_vector(alpha, Vector3d(x,y,z)); -
旋转向量 \(\Longrightarrow\) 旋转矩阵
// 第一种方法:通过构造方法传入旋转向量 Eigen::Matrix3d rotation_matrix(rotation_vector); // 第二种方法:首先初始化,然后通过旋转向量直接赋值(重载了赋值运算符) Eigen::Matrix3d rotation_matrix; rotation_matrix = rotation_vector; // 第三种方法:通过matrix方法 Eigen::Matrix3d rotation_matrix = rotation_vector.matrix(); // 第四种方法:通过toRotationMatrix方法 Eigen::Matrix3d rotation_matrix = rotation_vector.toRotationMatrix(); -
旋转向量 \(\Longrightarrow\) 欧拉角
// 不能直接转换,需要通过旋转矩阵搭桥 Eigen::Vector3d euler_angles = rotation_vector.matrix().eulerAngles(2, 1, 0); -
旋转向量 \(\Longrightarrow\) 四元数
// 第一种方法:通过构造函数传入旋转向量 Eigen::Quaterniond quaterniond(rotation_vector); // 第二种方法:首先初始化,然后用旋转向量赋值 Eigen::Quaterniond quaterniond; quaterniond = rotation_vector;
-
-
欧拉角
-
初始化欧拉角
Eigen::Vector3d euler_angles(yaw, pitch, roll); -
欧拉角 \(\Longrightarrow\) 旋转矩阵
// 初始化三个旋转角的旋转向量 Eigen::AngleAxisd rollAngle(AngleAxisd(euler_angles(2),Eigen::Vector3d::UnitX())); Eigen::AngleAxisd pitchAngle(AngleAxisd(euler_angles(1),Eigen::Vector3d::UnitY())); Eigen::AngleAxisd yawAngle(AngleAxisd(euler_angles(0),Eigen::Vector3d::UnitZ())); // 先初始化旋转矩阵为单位矩阵,然后这三个旋转向量相乘得到旋转矩阵(运算符重载) Eigen::Matrix3d rotation_matrix; rotation_matrix = yawAngle * pitchAngle * rollAngle; -
欧拉角 \(\Longrightarrow\) 旋转向量
// 初始化三个旋转角的旋转向量 Eigen::AngleAxisd rollAngle(AngleAxisd(euler_angles(0), Eigen::Vector3d::UnitX())); Eigen::AngleAxisd pitchAngle(AngleAxisd(euler_angles(1), Eigen::Vector3d::UnitY())); Eigen::AngleAxisd yawAngle(AngleAxisd(euler_angles(2), Eigen::Vector3d::UnitZ())); // 先初始化旋转向量,然后这三个旋转向量相乘得到旋转向量(运算符重载) Eigen::AngleAxisd rotation_vector; rotation_vector = yawAngle * pitchAngle * rollAngle; -
欧拉角 \(\Longrightarrow\) 四元数
// 初始化三个旋转角的旋转向量 Eigen::AngleAxisd rollAngle(AngleAxisd(euler_angles(2),Eigen::Vector3d::UnitX())); Eigen::AngleAxisd pitchAngle(AngleAxisd(euler_angles(1),Eigen::Vector3d::UnitY())); Eigen::AngleAxisd yawAngle(AngleAxisd(euler_angles(0),Eigen::Vector3d::UnitZ())); // 先初始化四元数,然后这三个旋转向量相乘得到旋转向量(运算符重载) Eigen::Quaterniond quaterniond; quaterniond = yawAngle * pitchAngle * rollAngle;
-
-
四元数
-
初始化四元数
Eigen::Quaterniond quaterniond(w, x, y, z); -
四元数 \(\Longrightarrow\) 旋转矩阵
// 第一种方法:通过构造方法传入四元数 Eigen::Matrix3d rotation_matrix(quaterniond); // 第二种方法:首先初始化,然后通过四元数直接赋值(重载了赋值运算符) Eigen::Matrix3d rotation_matrix; rotation_matrix = quaterniond; // 第三种方法:通过matrix方法 Eigen::Matrix3d rotation_matrix = quaterniond.matrix(); // 第四种方法:通过toRotationMatrix方法 Eigen::Matrix3d rotation_matrix = quaterniond.toRotationMatrix(); -
四元数 \(\Longrightarrow\) 旋转向量
// 第一种方法:通过构造函数传入一个四元数 Eigen::AngleAxisd rotation_vector(quaterniond); // 第二种方法:通过四元数直接赋值(运算符重载) Eigen::AngleAxisd rotation_vector; rotation_vector = quaterniond; -
四元数 \(\Longrightarrow\) 欧拉角
// 不能直接转换,需要靠旋转矩阵搭桥 Eigen::Vector3d euler_angles = quaterniond.matrix().eulerAngles(2, 1, 0);
-
-
在Eigen中的转换——总结篇
- 旋转矩阵到旋转向量的FRM()方法是fromRotationMatrix();
- 四元数和旋转向量到旋转矩阵用的同一套体系,其中TRM()方法是toRotationMatrix();
- 只有旋转矩阵才能直接转换为欧拉角,其EA()方法为eulerAngles();
- 欧拉角转换成其他旋转表述形式用的同一套体系:RPY相乘。先初始化三个旋转角(RPY)的旋转向量,然后初始化所需旋转表述形式,最后这三个旋转向量相乘得到相应旋转表述形式(运算符重载);
-
-
旋转表述的使用
-
旋转矩阵
Eigen::Vector3d v( 1,0,0 ); v_rotated = rotation_matrix * v; -
欧式矩阵
Eigen::Vector3d v( 1,0,0 ); Eigen::Isometry3d T=Eigen::Isometry3d::Identity(); // 为欧式矩阵设置旋转矩阵 T.rotate(rotation_vector); // 为欧式矩阵设置平移矩阵 T.pretranslate(Eigen::Vector3d(1, 3, 4)); Eigen::Vector3d v_transformed = T * v; -
旋转向量
Eigen::Vector3d v( 1,0,0 ); Eigen::Vector3d v_rotated = rotation_vector * v; -
欧拉角
Eigen::Vector3d v( 1,0,0 ); Eigen::Vector3d euler_angles(M_PI / 4, M_PI / 4, M_PI / 4); // 通过上述转换:rotation_matrix !!! Eigen::Vector3d v_rotated = rotation_matrix * v; -
四元数
Eigen::Vector3d v( 1,0,0 ); Eigen::Quaterniond q = Eigen::Quaterniond(rotation_vector); // 注意数学上的表达式是:qvq^{-1} Eigen::Vector3d v_rotated = q * v;
-
二、详述
-
旋转矩阵
-
旋转矩阵的定义
\[\begin{aligned}
&由旋转的本质方程:\beta_1^T\alpha_1=\beta_2^T\alpha_2,
又由于\beta是标准正交基,所以\beta\beta^T = E;
\\
&所以两边同时乘上\beta_1,故而可得\alpha_1=\beta_1\beta_2^T\alpha_2,记旋转矩阵R=\beta_1\beta_2^T;
\end{aligned}
\] -
旋转矩阵各个参数的意义
\(\beta\)是标准正交基,\(\alpha\)是相应坐标系下的坐标。
-
旋转矩阵各个参数的计算
\(R=\beta_1\beta_2^T\)。
-
-
欧式矩阵
-
欧式矩阵的定义
\[T =
\left[
\begin{matrix}
R&t\\
\it{0}^T&1
\end{matrix}
\right]
\] -
欧式矩阵各个参数的意义
\(R\)是旋转矩阵,\(t\)是平移向量,\(\it{0}^T\)是0列向量。
-
欧式矩阵各个参数的计算
不用计算,直接就有!!!
-
-
旋转向量
-
旋转向量的定义
\[\overrightarrow{n}与旋角\theta
\] -
旋转向量各个参数的意义
任何一个向量(或称为点)【1】的旋转都是绕着一个特定的轴来旋转,我们可以用这个轴的长度保存旋转角的大小\(\theta\)。故而旋转角被定义为:\(\theta\overrightarrow{n}\)。
【注】【1】:这里本来是坐标系的旋转,但是我们用相对的眼光看问题,我们如果聚焦于坐标系的话就相当与是向量在旋转。一个向量绕着一个轴在转可能比坐标系绕着一个轴在转好理解一点,这俩本质一样。
-
旋转向量各个参数的计算
-
旋转轴\(\overrightarrow{n}\)的计算
旋转轴在旋转的时候是不会变化的,所以有:\(R\overrightarrow{n}=\overrightarrow{n}\),即有\(\overrightarrow{n}\)为\(R\)的特征值为1的特征向量。
-
旋转角\(\theta\)的计算
罗德格里斯指出了旋转向量到旋转矩阵的法则:\(R=\cos{\theta}I+(1-\cos{\theta})\overrightarrow{n}\overrightarrow{n}^T+\sin{\theta}\overrightarrow{n}^{\wedge}\)。
同时取迹可得:\(\mathbf{tr}(R)=1+2\cos{\theta}\)。所以就计算出了\(\theta=\arccos{\frac{\mathbf{tr}(R)-1}{2}}\)。
-
-
-
欧拉角
-
欧拉角的定义
每个轴旋转一个特定的角度,但是有顺序要求,我们一般使用ZYX的顺序(称为RPY)。
-
欧拉角各个参数的意义
-
R:Roll,偏航角
-
P:Pitch,翻滚角
-
Y:Yaw,俯仰角
-
-
欧拉角各个参数的计算
通过传感器或者人为给出。不是吧不是吧,不会真有人用欧拉角吧?!【1】
【注】【1】:万向锁问题(奇异性)问题——只要我们想用3个实数来表达3维旋转时,都会不可避免地碰到奇异性问题。所以很少用这样的旋转表述方式,一般用也只是用于人机交互中传入旋转角度,或者验证系统的算法,因为这样的表述对于人类来说是非常直观的。
-
-
四元数
-
四元数的定义
\[q=(s,\overrightarrow{v})^{T}=(s,x,y,z)^{T}=s+xi+yj+zk
\] -
四元数各个参数的意义
-
实部\(s\)表示旋转程度:\(s=f(\theta)\);
-
虚部\(\overrightarrow{v}\)表示旋转轴:\(\overrightarrow{v}=k\overrightarrow{n}\);
虚部\(\overrightarrow{v}\)的定义为某个点在三维直角系下的坐标,由于四元数表示对一个向量(或称为点)的旋转,用数学公式可以严谨地证明,当对\(\overrightarrow{v}\)进行\(q=(s,\overrightarrow{v})^{T}\)旋转时不变,所以\(\overrightarrow{v}\)表示旋转轴。
-
-
四元数各个参数的计算(利用旋转向量)
-
实部\(s\)的计算
-
四元数 \(\Longrightarrow\) 旋转矩阵
\[\begin{aligned}
R& = \overrightarrow{v}\overrightarrow{v}^{T}+s^2I+2s\overrightarrow{v}^{\wedge}+(\overrightarrow{v})^2
\\\\
\mathbf{tr}(R)&=4s^2-1
\end{aligned}
\] -
旋转矩阵 \(\Longrightarrow\) 旋转向量
\[\begin{aligned}
\theta& = \arccos(\frac{\mathbf{tr}(R)-1}{2})=\arccos(2s^2-1)
\\\\
\theta& = 2\arccos{s}
\\\\
s& = \cos{\frac{\theta}{2}}
\end{aligned}
\]
-
-
虚部\(\overrightarrow{v}\)的计算
-
得到旋转轴
旋转轴就是四元数的虚部\(\overrightarrow{v}\)。
-
将四元数单位化
我们已经知道了实部\(s=\cos{\frac{\theta}{2}}\),所以虚部向量就只用除以一个\(\sin{\frac{\theta}{2}}\)就行了。
-
-
-
关注不迷路
扫码下方二维码,关注宇凡盒子公众号,免费获取最新技术内幕!







评论0